|
|

|

|
| e-Pub |
Section: New Results
Multi-label Image Segmentation with Partition Trees and Shape Prior
Participant : Guillaume Charpiat [contact] .
This work has been done in collaboration with Emmanuel Maggiori and Yuliya Tarabalka (Ayin team, Inria-SAM).
keywords: partition trees, multi-class segmentation, shape priors, graph cut
The multi-label segmentation of images is one of the great challenges in computer vision. It consists in the simultaneous partitioning of an image into regions and the assignment of labels to each of the segments. The problem can be posed as the minimization of an energy with respect to a set of variables which can take one of multiple labels. Throughout the years, several efforts have been done in the design of algorithms that minimize such energies.
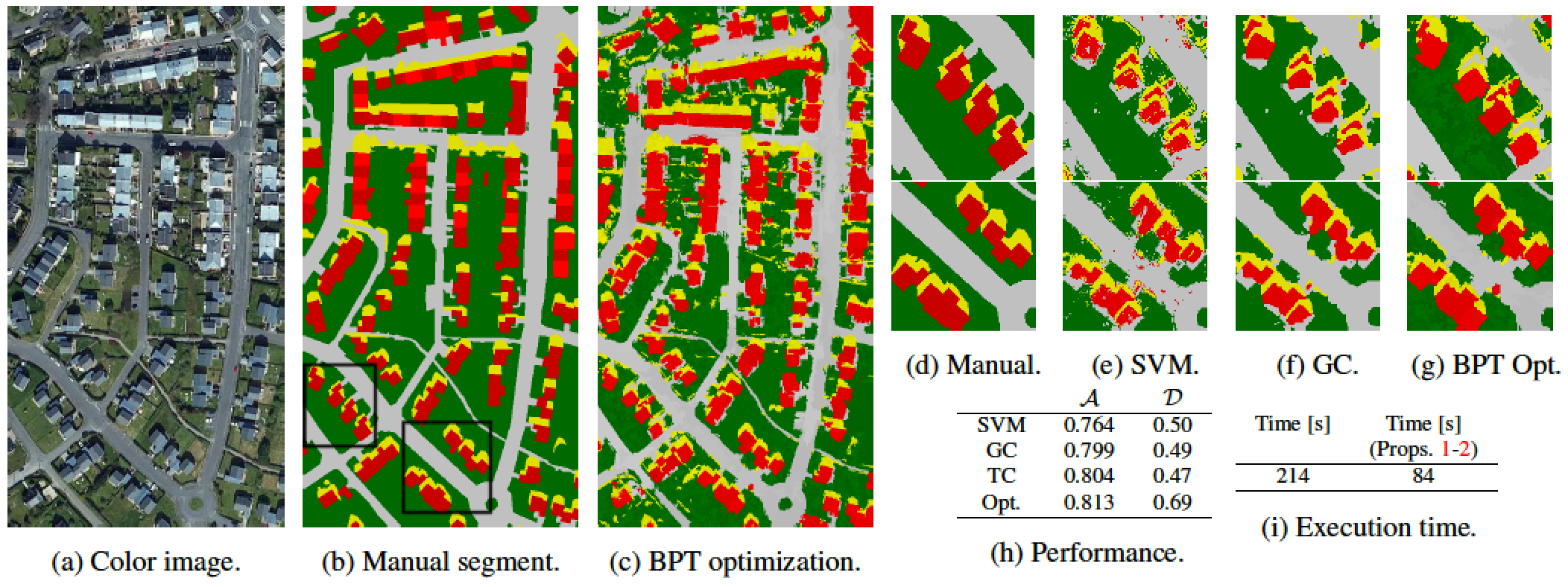
We propose a new framework for multi-label image segmentation with shape priors using a binary partition tree [50] . In the literature, such trees are used to represent hierarchical partitions of images, and are usually computed in a bottom-up manner based on color similarities, then processed to detect objects with a known shape prior. However, not considering shape priors during the construction phase induces mistakes in the later segmentation. This study proposes a method which uses both color distribution and shape priors to optimize the trees for image segmentation. The method consists in pruning and regrafting tree branches in order to minimize the energy of the best segmentation that can be extracted from the tree. Theoretical guarantees help reducing the search space and make the optimization efficient. Our experiments (see Figure 18 ) show that the optimization approach succeeds in incorporating shape information into multi-label segmentation, outperforming the state-of-the-art.
|